aeroTAPSrv (Web API) とは?
|
aeroTAPSrv (Web API) は、HTTPを介してaeroTAP APIを提供します。
|
主な機能
- Webサーバー機能
シンプルなWeb サーバーの機能を提供します。
- オペレーターの有無
稼働中の aeroTAP がオペレーターを検出しているかどうかを取得します。
*オペレーターの検出は、aeroTAP の距離フィルターが有効の場合にのみ機能します。
- 手のひらトラッキング
稼働中の aeroTAP の手のひら検出状態を取得します。
- ポート番号の設定、自動機能
aeroTAPSrv 設定画面
aeroTAP evo を実行しているPCでaeroTAPSrv を実行します。
重要: aeroTAP evo と aeroTAPSrv は、同じフォルダーで実行する必要があります。
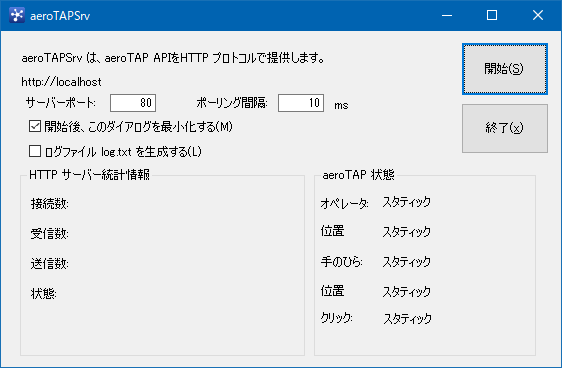
| 項目 | 説明 |
|---|---|
| aeroTAP 3D USB カメラ | 利用するカメラを選択します。*aeroTAP evoが2台のカメラで実行されている場合のみ。 |
| サーバーポート | HTTP サーバーとして利用するポート番号を設定します。 |
| ポーリング間隔 |
aeroTAP の状態を取得する間隔 (ms) を指定します。 |
| 開始後、このダイアログを最小化する | チェックすると、開始後、自動的にダイアログを最小化します。 最小化後は、Alt+Tabキーで画面を回復し、チェックボックスを解除することで、画面を表示したままにできます。 |
| ログファイル log.txt を生成する | チェックすると、ログファイル log.txt を aeroTAPSrv.exe と同じフォルダーに生成します。 *インストール先フォルダーによっては、管理者権限で実行しないとログ生成できない場合があります。 |
aeroTAPSrv 起動パラメーター
aeroTAPSrv で設定可能な起動パラメーターは下記のとおりです。
| パラメーター | 説明 |
|---|---|
| /a または /A | 最後に実行した設定で自動起動します。 |
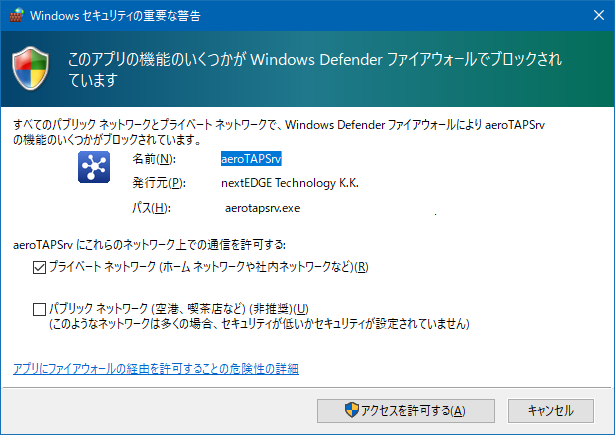
Windows ファイアウォールの設定
aeroTAPSrv が HTTPサーバーとして稼働するためには、ファイアウォールの設定が必要になります。
初めて実行する際、下記の警告メッセージが表示されたら、[アクセスを許可する]を選択して進めてください。
aeroTAPSrv APIの書式
| トラッキング情報の取得 リクエスト: http://localhost/ 応答: OP オペレーターの有無, (重心座標x,y,z), Palm 手のひら検出の有無, (座標x,y,z), クリック有無 *重心座標は、320x240座標系(固定) の位置です。手のひら座標は、画面上の座標 (解像度の依存) です。 例: OP 0, (0,0,0),Palm 0, (0,0,0),0 カラー画像の取得 リクエスト: http://localhost/color.bmp 深度画像の取得 リクエスト: http://localhost/depth.bmp |