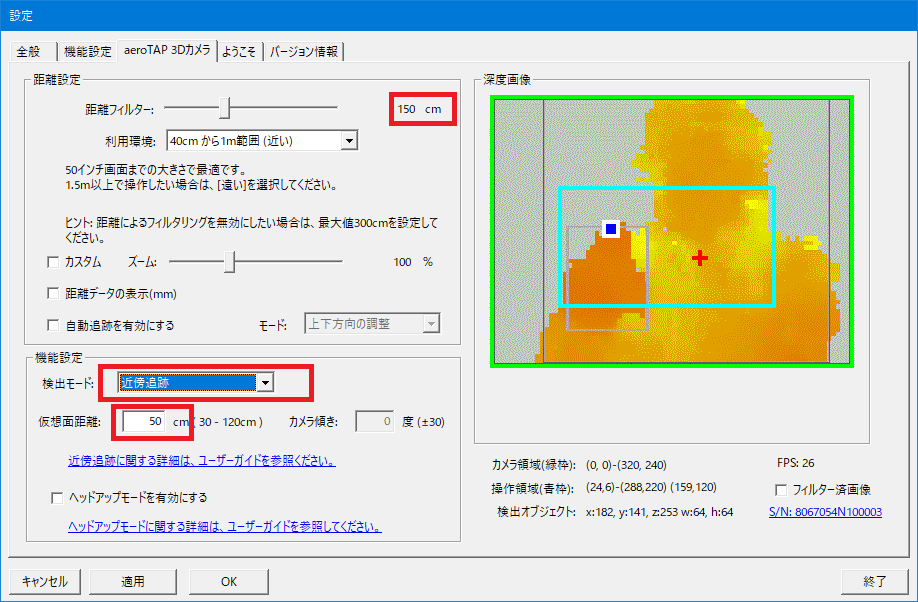
Nearest Object Tracking mode can be selected from the Tracking mode in the aeroTAP 3D camera settings. This mode enables operation of the cursor not by palm tracking but by tracking nearest object that is within the range of about 80cm from the camera.
Nearest Object Tracking mode detects and tracks the nearest object using the distance information from aeroTAP 3D USB camera. For example, you can operate the virtual cursor by moving your hand or an object close to the camera, which will be tracked. This mode is useful when palm operation is difficult in your environment; for example when the camera cannot capture the upper body of the operator.
Important: The difference between Palm Tracking is that if there is a person of object close to the camera, it can interfere smooth operation. This mode doesn't detect shapes such as the palm, so when someone or something gets close to the camera, it can accidentally be detected and tracked. This mode does not suit environments with some or something nearby.
This mode is effective in environments where distance data can be acquired relatively well. Please be sure to check your environment beforehand, using the depth image. In some environments, you can improve the situation with the information mentioned in Configuration of depth mask when the depth data acquired is incorrect.
The "blue dot" displayed on the depth image indicates the nearest object. You can check if tracking goes well in your environment, by moving your finger in front of the camera.
Available tracking modes are Palm & Nearest Object Tracking, Nearest Object Tracking (hybrid) and the original Palm Tracking.
The recommended settings are shown below: Set the distance filter around 140cm according to the detection distance. To operate in a closer range, set the distance filter to a smaller value.
Hint: In some environments, aeroTAP 3D Camera may not be able to acquire the depth image successfully. The blue point in the depth image indicates that the nearest object is detected and tracked successfully. Please make sure of this before starting the operation.
Important: It is hard to make precise operations in Nearest Object Tracking mode. This mode is more useful for big buttons or pictures.
Hint: To make the virtual cursor move more smoothly, go to Settings for Virtual Cursor in the General tab and adjust the value for Smooth move parameter.
Video Tutorial
Tracking (detection) Mode
Tracking (detection) Mode
Description
Palm Tracking
Only detects and tracks the palm
Palm & Nearest Object Tracking
Detects both palm and nearest object. Palm will be prioritized when a palm is detected.
Nearest Object Tracking
Only detects and tracks nearest object. It will not detect the palm.
How to use Nearest object tracking mode
The range of detecting an object for Nearest Object Tracking mode is 30cm to 80cm. Your fingers will be detected when you move them close to the camera. Please be aware of the following point when using a pen or a thin stick. Nearest Object Tracking mode detects the closest point but if it is too small or too thin it cannot be detected as an object. The best size for detection is using 2 fingers or a fist.
Click Actions in Nearest Object Tracking Mode
You can choose from the following click actions; Click when Stopped, Grab to Click (Tap) , or Push to Click.
Important: We recommend the use of Push to Click for Nearest Object Tracking Mode.
Actual Operation
Description
Pointing
Pointing with 2 fingers will make the operation stable than only using a finger.
Click
Click action will differ according to Types of Click actions settings in Advanced Settings. When Grab to Click is selected, the tapping action with your fingers will perform the click action.
Tap action is only valid within 70cm from the camera (the cursor will change red when it is in the valid distance range).
Tap action Stop at the place you want to select and click
When you move your finger(s) down, click action will be performed.
Nearest Object Tracking Mode configuration hint
When pointing with Nearest Object Tracking mode, cursor movement will become unstable when operating from a distance. On the other hand, pointing will be more difficult when operating from a closer point. When Nearest Object Tracking Mode is selected, you can enhance the usability using one of the following
1. To make the virtual cursor move more smoothly, adjust the value for Smooth move parameter in the General tab.
This slows down the cursor's moving speed but the move will be much smoother. Select for example the value x4.
2. Use Push to Click for Recognition of Click actions
We recommend that you use Push to Click in the Recognition of Click actions (Feature Settings tab). Push to Click detects the stop of the virtual cursor and when pushed about 10cm towards the camera, it performs a click action.
3. Tilt the camera about 20 degrees
You can tilt the camera for the maximum of 20 degrees so you can operate without moving your hand too high. This mode is useful when the camera cannot capture the upper body of the operator. If you tilt the camera too much the click recognition accuracy will drop.
4. Display the Guidance image and use operation lock
Nearest Object Tracking mode has a higher possibility of false recognition of operation than palm tracking. This happens because it tracks whatever is the most closet to the camera. To reduce false recognition, we recommend using the Display of Guidance Image and Using Operation Lock Feature. This will perform the operation made only by the operator.
5. Expand the operation area to the camera view in Welcome tab (Only for Professional version)
This will enlarge the ratio of the operation area and the actual screen size making the operation stable and also enables detailed pointing operations.
6. Configure depth mask
In some environments, the depth map acquired may not be correct, because the Nearest Object tracking Mode tracks the nearest object using the depth map from the 3D sensor. You can improve this problem by Configuring depth mask after setup.
 ).
).