 |
Nuitrack 1.5.0
3D スケルトン トラッキング ミドルウェア
|
スケルトン データを保存します。詳細...
Public メンバー関数 | |
| � | Skeleton (int id, Joint[] joints) |
| � | nuitrack.Skeleton クラスの新しいインスタンスを初期化します。詳細... |
| � | |
| Joint� | GetJoint (JointType jointType) |
| � | 関節を取得します。詳細... |
| � | |
プロパティ | |
| int� | ID [get, set] |
| � | ID を取得します。詳細... |
| � | |
| Joint[]� | Joints [get, set] |
| � | 関節を取得します。詳細... |
| � | |
スケルトン データを保存します。
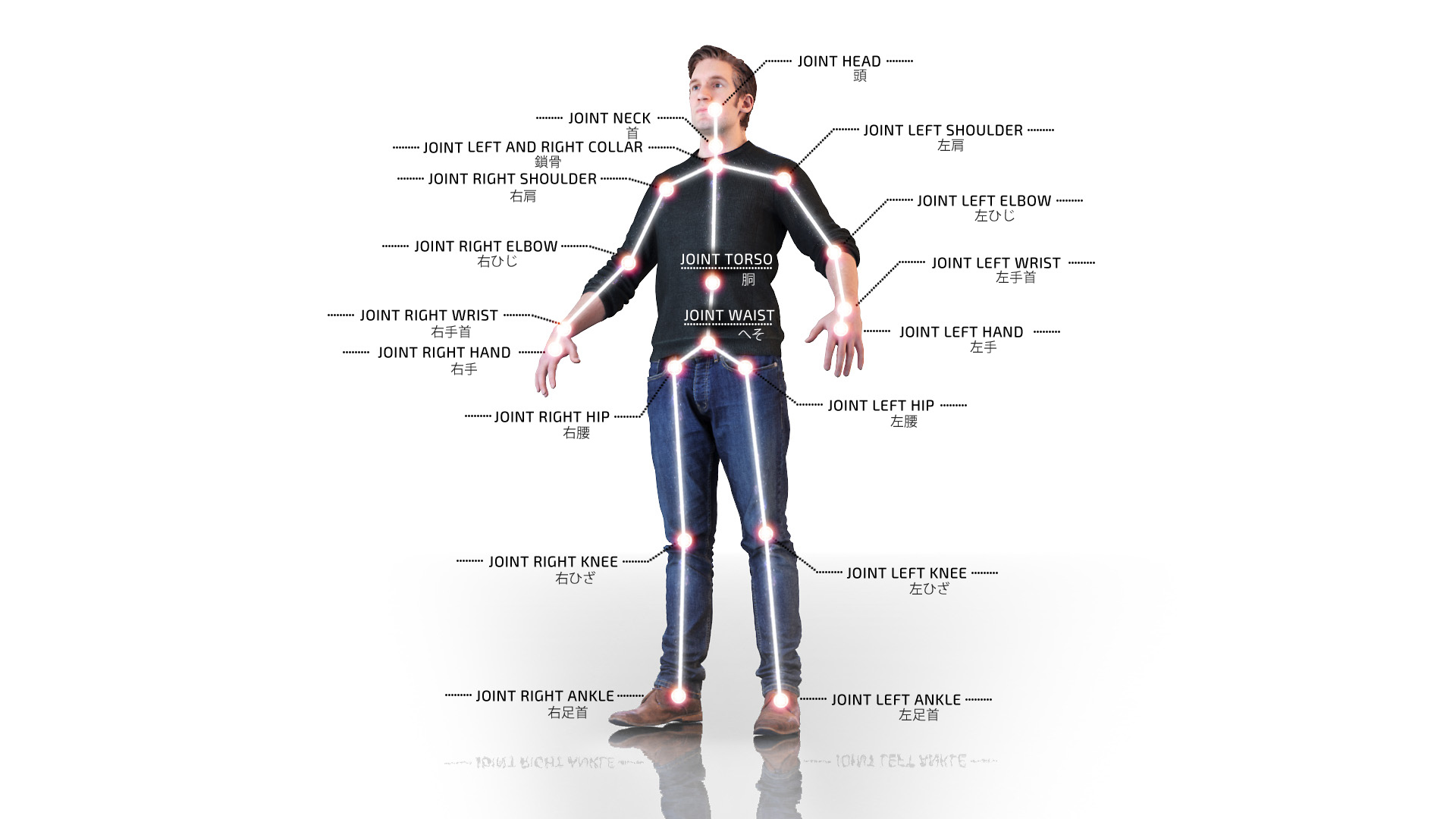
スケルトンは、関節の組み合わせからなっており、それぞれの関節の位置と方向が決まっています。隣接する関節が仮想の骨によってつながっている場合、簡易的な人間のスケルトン (スケルトン) が完成します。関節の方向は、そこから出る骨の方向と同じになります。
スケルトンの配置は以下の画像に示されています。

|
インライン |
nuitrack.Skeleton クラスの新しいインスタンスを初期化します。
| [in] | id | 識別子 |
| [in] | joints | Joints. |
|
getset |
ID を取得します。
|
getset |
関節を取得します。
 1.8.6 を使用
1.8.6 を使用
