OpenNI2 ドライバを利用して、様々な 3D センサー(RGBD) に対応した、PCL(Point Cloud Library), SLAM, RTABMap などのアプリケーションや開発環境で aeroTAP 3D USB カメラを利用することができます。
ここでは、aeroTAP OpenNI2 ドライバの入手と設定方法について説明します。
a) GitHubから最新のOpenNI2 ドライバーをダウンロードしてください。
GitHub - aeroTAP_OpenNI2 Driver for Win32/64, Linux, Arm, Aarch64
b) Bin/Win-x64 ,または Bin/Win-x32 フォルダーに実行可能なサンプルプログラムがあります。
SimpleView.exe を実行して、確認することができます。
補足: Visual Studio 2015 再領布プログラムのインストールが必要です。
GitHub OpenNI2からソースコードを入手し、コンパイルすることで、その他サンプルコードの実行を確認できます。
ヒント: その他、OpenNI2 を利用するアプリケーションを実行する場合、OpenNI2\Drivers フォルダーに aeroTAP OpenNI2 ドライバー 一式をコピーし、OpenNI.ini ファイルを編集して、[Device] セクションに aeroTAP ドライバを設定することで動作するはずです。
Ubuntu x64, Raspberry Pi2/3/4, Dragonboard 410c, NanoPi NEO3 用のドライバも追加しました。
Raspberry pi4 aeroTAP 3D USBカメラをOpenNi2 で動かす
x64-Release Ubuntu x64 用
Arm-Release Raspberry Pi2/3/4 用
aarch64-Release Dragonboard 410c , Nano Pi NEO3用
重要: これらのLinux 環境では、lib*.so ファイルを共有ライブラリパスにコピーするか、'export LD_LIBRARY_PATH' コマンドを設定する必要があります。
バージョン履歴
aeroTAP.ini ファイルのカスタマイズ
aeroTAP.ini ファイルをカスタマイズすることで、OpenNI2 ドライバを各種アプリケーションに対応した利用が可能です。
| パラメータ名とデフォルト値 |
説明 |
| Filter=1 |
深度データにカメラからのRAW データを取得する場合、値を0にします。PCL や RTABMap で実行する場合。
例: Filter=0 |
| CamNo=0 |
複数のカメラが接続されている場合に、カメラ番号を指定します。2番目のカメラを使う場合、
例: CamNo=1 |
| Rotate=1 |
カメラを90°回転して設置する場合、Rotate パラメータの値を1に設定します。OPENNI2を介すと、回転しても解像度はVGAのままです。
例: Rotate=1
Windows OSのみ |
| Mirror=1 |
カメラ画像の左右反転。画像の反転は、OpenNI2 API を介してアプリケーション側で設定することができますが、アプリケーションが未対応の場合などに設定することができます。値を1に設定すると反転します。 |
camWidth=1280
camHeight=720 |
カメラ解像度を指定します。ここでカメラ解像度を変更しても、aeroTAP 用 OpenNI2 ドライバの出力解像度は、640x480(VGA) となります。
aeroTAP 3D USB では、QVGA(320x240), VGA(640x480), WVGA(640x400)
aeroTAP 3D USB G2 では、QVGA(320x240), VGA(640x480), WVGA(640x360), HD(1280x720)
aeroTAP 3D USB GS では、VGA(640x480), HD(1280x720)
が選択可能です。 |
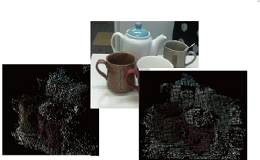
 Windows環境での4台 カメラ接続、PCL サンプルプログラム
Windows環境での4台 カメラ接続、PCL サンプルプログラム